Преобразование матрицы линейного оператора
Теория- Автор
- Издательство
Матрица линейного оператора изменяется, когда изменяется базис линейного пространства. Возникает естественный вопрос, как она изменяется. Напомним, что связь двух базисов, старого (исходного) и нового, отражается матрицей перехода.
Теорема 4.6. Матрицы Аb и Аe линейного оператора А: L → L, записанные в базисах b и е линейного пространства L, связаны друг с другом соотношением
Аe = U-1AbU, (4.2)
где U = Ub→e - матрица перехода от базиса b к базису е.
◄ Пусть у = Ах. Обозначим координаты векторов х и у в старом базисе b через хb и уb, а в новом базисе е - через хe и уe. Поскольку действие линейного оператора А в матричной форме в базисе b имеет вид уb = Аbхb (см. теорему 4.3), а координаты векторов х и у в новом и старом базисах связаны между собой равенствами (см. 1.8)
xb = Uxe, yb = Uye,
то получаем
ye = U-1b = U-1(Abxb) = U-1(AbUxe) = (U-1AbU)хe .
Равенство уe = (U-1AbU) хe является матричной формой записи действия линейного оператора А в базисе е и поэтому, согласно теореме 4.4, U-1AbU = Аe.
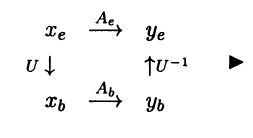
Изложенное доказательство теоремы хорошо иллюстрирует следующая диаграмма:
Определение 4.5. Квадратные матрицы А и В порядка n называют подобными, если существует такая невырожденная матрица Р, что Р-1АР = В.
Формула (4.2) означает, что матрицы, представляющие один и тот же линейный оператор в разных базисах, являются подобными. Верно также и обратное: если две матрицы А и В подобны, т.е. В = Р-1AР, то их можно рассматривать как матрицы одного оператора, но в разных базисах. Дей-ствительно, в произвольном п-мерном линейном пространстве зафиксируем произвольный базис Ь и выберем линейный оператор, который в этом базисе имеет матрицу А. Тогда в базисе е = bР этот же оператор будет иметь матрицу Р-1АР = В.
Теорема 4.7. Если матрицы А и В подобны, то detА = detВ.
◄ Если матрицы А и В подобны, то, согласно определению 4.5, существует такая невырожденная матрица Р, что В = Р-1АР. Так как определитель произведения квадратных матриц равен произведению определителей этих матриц, a det(P-1) = (detP)-1 [III], то получаем
detB = det (P-1AP) = det(P-1) detA detP = detA. ►
Следствие 4.2. Определитель матрицы линейного оператора не зависит от выбора базиса.
◄ Действительно, возьмем матрицы Аb и Аe линейного оператора А в двух различных базисах b и е. Согласно теореме 4.6 и определению 4.5 эти матрицы подобны. Поэтому det Аb = det Аe по теореме 4.7. ►
Следствие говорит о том, что, хотя матрица линейного опе-ратора и изменяется при замене базиса, определитель ее при этом остается неизменным. Значит, этот определитель ха-рактеризует не конкретную матрицу оператора в конкретном базисе, а сам оператор. Это позволяет ввести следующее понятие.
Определение 4.6. Определителем линейного оператора называют определитель его матрицы в каком-либо базисе.
Пример 4.10. Линейный оператор A: V3 → V3, определяемый формулой Ах = x × i, в базисе i, j, k имеет матрицу
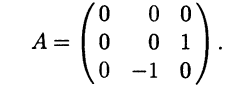
(см. пример 4.9). Определитель этой матрицы равен нулю. Значит, и в любом другом базисе определитель матрицы этого линейного оператора равен нулю.
Линейные операции над векторами
Базис. Cкалярное произведение
Векторное и смешанное произведения векторов
Декартова система координат. прямая на плоскости
Плоскость в пространстве
Прямая в пространстве
Кривые второго порядка — I
Кривые второго порядка — II
Поверхности второго порядка
Матрицы и операции с ними
Обратная матрица
Ранг матрицы
Системы линейных алгебраических уравнений
Свойства решений однородных и неоднородных СЛАУ