Ортогональные системы векторов
Теория- Автор
- Издательство
Определение 3.5. Два вектора в евклидовом пространстве называют ортогональными, если их скалярное произведение равно нулю.
Ортогональность векторов х и у будем обозначать так: х ⊥ у. Отметим, что, согласно свойству 3.3 скалярного умножения, нулевой вектор ортогонален любому другому.
Евклидово пространство - это, согласно определению 3.1 частный случай линейного пространства, и поэтому можно говорить о его линейных подпространствах в смысле определения 2.1. Каждое из таких линейных подпространств является евклидовым пространством относительно скалярного умножения, заданного в объемлющем евклидовом пространстве.
Говорят, что вектор х в евклидовом пространстве Ε ортогонален подпространству H, и обозначают х ⊥ H,, если он ортогонален каждому вектору этого подпространства.
Если H = span{a1,...,аk}, то условие х ⊥ H равносильно тому, что вектор х ортогонален каждому вектору a1,..., аk. Действительно, если х ортогонален H, то, согласно определению, он ортогонален и каждому вектору a1,..., аk. Докажем противоположное утверждение. Пусть х ⊥ ai i = 1,k, и y ∈ H. Тогда вектор у является линейной комбинацией векторов аi:
y = α1a1 + ... + αkak,
и поэтому, согласно свойству 3.4,
(x,y) = α1(x, a1)+ ... + αk(x, ak) = 0.
В частности, если векторы х и а ортогональны, то для любого λ ∈ R векторы х и λа тоже ортогональны:
(x, λа) = λ(x, а) = 0.
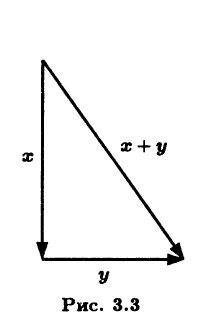
В пространстве V3 ненулевым ортогональным векторам х и у можно сопоставить катеты прямоугольного треугольника, причем так, что их сумме, построенной по правилу треугольника, будет соответствовать гипотенуза этого прямоугольного треугольника (рис. 3.3). По аналогии с V3 мы назовем в евклидовом пространстве сумму х + у ортогональных векторов х и у гипотенузой треугольника, построенного на х и у. Тогда на произвольное евклидово пространство распространяется известная теорема Пифагора.
Теорема 3.3. Если векторы ж и у из евклидова простран-ства ортогональны, то
||x + y||2 = ||x2|| + ||y2||
◄ Здесь под нормой мы, как обычно, понимаем евклидову норму. Выразим левую часть этого равенства через скалярное произведение и воспользуемся условием ортогональности (x,у) = 0:
||x + y||2 = (x + y, x + y) = (x,x) + 2(x,y) + (y, y) = ||x2|| + ||y2|| ►
Определение 3.6. Систему векторов евклидова пространства называют ортогональной, если любые два вектора из этой системы ортогональны.
Следующее свойство ортогональной системы является самым важным.
Теорема 3.4. Любая ортогональная система ненулевых векторов линейно независима.
◄ Рассмотрим произвольную ортогональную систему ненулевых векторов e1, ..., еm. Предположим, что для некоторых действительных коэффициентов α1,..., αm выполняется равенство
α1e1 +... + αmem = 0. (3.5)
Умножим это равенство скалярно на какой-либо вектор еi:
(α1e1 +... + αiei + ... + аmеm, еi) = (0, еi).
В силу свойства 3.3 скалярного произведения правая часть полученного равенства равна нулю, и мы, преобразуя левую часть в соответствии со свойством 3.4, получаем
α1(e1,ei +...+ αi(еi, еi) +... + αm(e1, еi) = 0.
Так как система векторов ортогональна, то все слагаемые слева, кроме одного, равны нулю, т.е.
αi(еi, еi) = 0. (3.6)
Так как вектор е{ ненулевой, то (ei, в{) Ф 0 (аксиома г) скалярного умножения). Поэтому из (3.6) следует, что = 0. Индекс г можно было выбирать произвольно, так что на самом деле все коэффициенты ai являются нулевыми. Мы доказали, что равенство (3.5) возможно лишь при нулевых коэффициентах, а это, согласно определению 1.2, означает, что система векторов ех, ..., ет линейно независима. ►
Пример 3.10. В евклидовом пространстве C[0, π] система функций coskx, k = 1,n, является ортогональной, поскольку
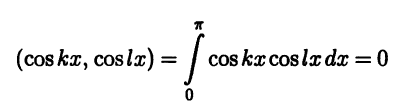
при k,l = 1,n, k ≠ l
Линейные операции над векторами
Базис. Cкалярное произведение
Векторное и смешанное произведения векторов
Декартова система координат. прямая на плоскости
Плоскость в пространстве
Прямая в пространстве
Кривые второго порядка — I
Кривые второго порядка — II
Поверхности второго порядка
Матрицы и операции с ними
Обратная матрица
Ранг матрицы
Системы линейных алгебраических уравнений
Свойства решений однородных и неоднородных СЛАУ