Преобразование координат вектора при замене базиса
Теория- Автор
- Издательство
В линейном пространстве все базисы равноправны. Тот или иной базис выбирают исходя из конкретных обстоятельств, а может быть, и вообще произвольно. Иногда удобно использовать для представления элементов линейного пространства несколько базисов, но тогда естественным образом возникает задача преобразования координат векторов, которое связано с изменением базиса.
Пусть в n-мерном линейном пространстве L заданы два базиса: старый b = (b1 ... bn) и новый с = (с1 ... сn). Любой вектор можно разложить по базису Ь. В частности, каждый вектор из базиса с может быть представлен в виде линейной комбинации векторов базиса b:
ci = α1ib1 + ... + αnibn, i = 1,n.
Запишем эти представления в матричной форме:
или
c = bU,
где
Определение 1.6. Матрицу (1.7) называют матрицей перехода от старого базиса b к новому базису с.
Согласно данному определению, i-й столбец матрицы пе-рехода есть столбец координат i-го вектора нового базиса в старом. Поэтому говорят, что матрица перехода состоит из координат векторов нового базиса в старом, записанных по столбцам.
Обсудим некоторые свойства матрицы перехода.
1°. Матрица перехода невырождена и всегда имеет обратную.
◄ Действительно, столбцы матрицы перехода - это столбцы координат векторов нового базиса в старом. Следовательно, они, как и векторы базиса, линейно независимы. Значит, матрица U невырожденная и имеет обратную матрицу U-1 [III]. ►
2°. Если в n-мерном линейном пространстве задан базис b, то для любой невырожденной квадратной матрицы U порядка п существует такой базис с в этом линейном пространстве, что U будет матрицей перехода от базиса b к базису с.
◄ Из невырожденности матрицы U следует, что ее ранг равен n, и поэтому ее столбцы, будучи базисными, линейно независимы. Эти столбцы являются столбцами координат векторов системы с = bU. Линейная независимость столбцов матрицы U равносильна линейной независимости системы векторов с. Так как система с содержит n векторов, причем линейное пространство n-мерно, то, согласно теореме 1.4, эта система является базисом. ►
Пример 1.15. Пусть b = (b1 b2 b3) - базис линейного пространства. Тогда система векторов c1 = 2b1, c2 = - b2, c3 = b3 тоже является базисом в этом линейном пространстве. Это следует из того, что
(c1 c2 c3) = (b1 b2 b3)U,
где диагональная матрица U = diag(2, -1, 1) невырождена.
3°. Если U - матрица перехода от старого базиса b к новому базису с линейного пространства, то U-1 - матрица перехода от базиса с к базису b.
◄ Матрица U невырождена, и поэтому из равенства с = bU следует, что cU-1 = b. Последнее равенство означает, что столбцы матрицы U-1 являются столбцами координат векторов базиса b относительно базиса с, т.е., согласно определению 1.6, U-1 - это матрица перехода от базиса с к базису b. ►
4°. Если в линейном пространстве заданы базисы b, с и d, причем U - матрица перехода от базиса b к базису с, а V - матрица перехода от базиса с к базису d, то произведение этих матриц UV - матрица перехода от базиса b к базису d.
◄ Согласно определению 1.6 матрицы перехода, имеем равенства
с = bU, d = cV,
откуда
d = cV = (bU)V = b(UV),
т.е. UV - матрица перехода от базиса b к базису d. ►
Рассмотрим теперь, как преобразуются координаты про-извольного вектора в линейном пространстве при переходе от старого базиса к новому. Выберем произвольный вектор х ∈ L и разложим его в старом базисе:
Разложение того же вектора в новом базисе имеет вид
Найдем связь между старыми координатами х вектора х и новыми его координатами х'. Из соотношений (1.8), (1.9) следует, что bх = сх'. Учитывая, что с = bU, получаем bх = (bU)x', или bх = b(Ux'). Последнее равенство можно рассматривать как запись двух разложений одного и того же вектора х в данном базисе b. Разложениям соответствуют столбцы координат х и Ux', которые, согласно теореме 1.2 о единственности разложения вектора по базису, должны быть равны:
x = Ux', или х' = U-1x.
Итак, чтобы получить координаты вектора в старом базисе, необходимо столбец координат этого вектора в новом базисе умножить слева на матрицу перехода из старого базиса в новый. Матрица перехода из старого базиса в новый позволяет пересчитывать новые координаты в старые.
Пример 1.16. Рассмотрим в V2 ортонормированный базис b = (i j) из векторов i, j. Обозначим через е = (e1 е2) новый базис, который получается поворотом старого базиса b на заданный угол φ. Исходя из заданного угла поворота мы можем найти координаты векторов e1, e2 нового базиса относительно старого (рис. 1.2):

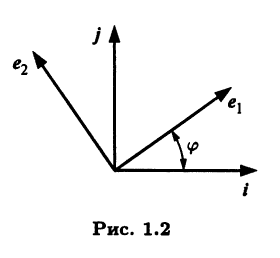
Эти разложения позволяют составить матрицу перехода U из старого базиса b в новый е, а также обратную матрицу:

Найденные матрицы перехода U (из старого базиса в новый) и U-1 (из нового базиса в старый) позволяют записать соотношения между старыми х1, х2 и новыми х'1, х'2 координатами произвольного вектора x из V2:
x'1 = x1cosφ + x2sinφ x1 = x'1cosφ + x'2sinφ
x'2 = -x1sinφ + x2cosφ x2 = x'1sinφ + x'2cosφ .
Например, вектор x = i + j в старом базисе имеет координаты х1 = 1, x2 = 1, а в новом базисе - х'1 = cosφ + sinφ, х'2 = - sinφ + соsφ.
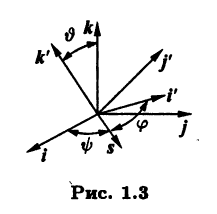
Пример 1.17. Пусть в линейном пространстве V3 заданы два правых ортонормированных базиса: старый (i j к) и новый (i' j' k'). Тогда старый базис можно преобразовать в новый при помощи трех поворотов вокруг координатных осей прямоугольной системы координат, определяемой ортонормированным базисом.
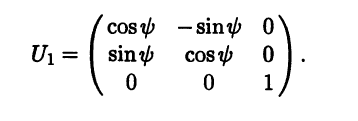
Рассмотрим единичный вектор s, который одновременно лежит в плоскостях пар векторов i, j и i' ,j'. Повернем базис (i j к) вокруг оси вектора k на некоторый угол ψ так, что вектор i совпадет с вектором s. Отметим, что вектор s ортогонален и вектору k, и вектору k', так как является линейной комбинацией и пары i, j, и пары i', j'. Значит, поворотом вокруг оси вектора s на некоторый угол ϑ можно добиться совмещения вектора k с вектором k'. Наконец, поворотом вокруг оси вектора k' на некоторый угол φ совместим вектор s с вектором i' (рис. 1.3).
Матрица перехода, соответствующая первому повороту вокруг оси вектора k, имеет вид
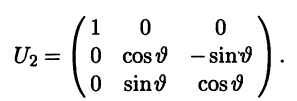
Матрица перехода А2, соответствующая повороту уже нового базиса вокруг оси вектора s на угол ϑ, похожа на предыдущую:
Наконец, матрица перехода, соответствующая третьему повороту вокруг оси вектора k' имеет вид
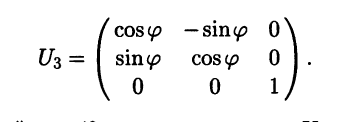
Согласно свойству 4°, матрица перехода U из старого базиса (i j k) в новый базис (i' j' k') равна U = U1U2U3 и может быть записана в виде

Дополнение 1.1. Линейное пространство над полем Р
Мы ввели понятие линейного пространства как множества произвольной природы, на котором заданы две операции: сложение элементов множества и умножение элемента множества на число. Согласно замечанию 1.1, под числами можно понимать как действительные числа, так и комплексные. Обе операции должны подчиняться аксиомам линейного пространства, при этом происхождение этих операций совершенно несущественно.
Этот подход можно развивать, давая понятию "число" расширительное толкование. Само понятие числа характеризуется в первую очередь тем, что над числами можно выполнять четыре арифметические операции. Если наличие четырех арифметических операций взять за основу, мы придем к алгебраической структуре, называемой полем. Напомним, что в самом широком толковании алгебраическая структура (алгебраическая система) - это некоторое множество, на котором задана одна или несколько алгебраических операций, подчиняющихся некоторому набору аксиом. Алгебраическая операция (внутренний закон композиции, [I-4.1]) на множестве X - это такой закон, или правило, который любому упорядоченному набору x1,..., хn элементов множества X (операндов) ставит в соответствие единственный элемент того же множества (результат этой операции). Наиболее распространены бинарные алгебраические операции, имеющие два операнда (т.е. n = 2).
Определение 1.7. Полем называют множество Р произвольной природы, на котором заданы две бинарные алгебраические операции, условно сложение (+) и умножение (•), подчиняющиеся следующим аксиомам поля:
а) сложение коммутативно: а + b = b + а;
б) сложение ассоциативно: (а + b) + с = а + (b + с);
в) существует такой элемент 0 ∈ Р (нулевой элемент, или нуль), что а + 0 = а для любого элемента a ∈ Р;
г) каждый элемент a ∈ Р имеет противоположный (симметричный) элемент (-а), такой, что а + (-а) = 0;
д) умножение коммутативно: а • b = b • а;
е) умножение ассоциативно: (а • b) • с = а • (b • с);
ж) существует такой элемент е ∈ Р (единичный), что а • e = а для любого а ∈ Р;
з) каждый элемент а ∈ Р, а ≠ 0, имеет обратный элемент а-1, такой, что а • а-1 = е;
и) умножение дистрибутивно относительно сложения: (а + b) • с = (а • с) + (b • с).
Отметим, что первые четыре аксиомы поля, относящиеся к операции сложения, совпадают с соответствующими аксиомами линейного пространства. Так же как и в линейном пространстве, исходя из аксиом в) и г) строим операцию вычитания, полагая, например, что, по определению,
а - b = а + (-b).
Аксиомы ж) и з), относящиеся к умножению, аналогичны аксиомам в) и г). Они позволяют определить операцию деления:
а/Ь = а • b-1, b ≠ 0.
Сложение и умножение задаются в поле априори, их называют основными операциями, а вычитание и деление, которые базируются на свойствах основных операций, называют дополнительными операциями.
Аксиомы поля позволяют с его элементами оперировать так же, как и с числами. Сохраняются основные правила пре-образования выражений. В записи выражений используют те же соглашения, что и в записи числовых выражений. Знак операции умножения опускают, если сомножители обозначены буквами, т.е. вместо а • b пишут ab. В выражениях действует приоритет операций умножения и деления по отношению к сложению и вычитанию. Если в выражении записаны несколько операций подряд, то сперва выполняются более приоритетные операции. Операции одного приоритета выполняются в порядке слева направо. Например, в выражении a + bc - d/f сперва следует операция умножения bс, затем деления d/f, затем сложения, последней выполняется операция вычитания.
Операция умножения на число в линейном пространстве на самом деле не опирается на специфические свойства дей-ствительных чисел. Важно лишь, что числа можно умножать (используется в аксиомах д) и е) линейного пространства) и складывать (аксиома ж)). Операция сложения вообще оперирует только элементами линейного пространства. Поэтому можно, опираясь на то же определение 1.1, ввести линейное пространство над произвольным полем Р. Такое линейное пространство определяют как множество произвольной природы, на котором заданы две операции: сложение, подчиняющееся аксиомам а)-г) линейного пространства, и умножение элементов линейного пространства на элементы поля Р, подчиняющееся аксиомам д)-з) линейного пространства.
В качестве поля Р чаще всего рассматривают поле действительных чисел R и поле комплексных чисел С. Это объясняет введенную ранее терминологию (" линейное пространство над полем действительных чисел ", "линейное пространство над полем комплексных чисел", см. замечание 1.1).
Пример 1.18. Рассмотрим однородную СЛАУ
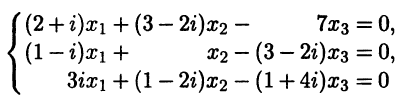
с комплексными коэффициентами. Множество ее решений представляет собой комплексное линейное пространство. Размерность и базис этого пространства мы определим, если найдем фундаментальную систему решений этой СЛАУ. Решаются системы с комплексными коэффициентами по той же схеме, что и СЛАУ с действительными коэффициентами. Записываем матрицу СЛАУ и при помощи элементарных преобразований строк приводим ее к ступенчатому виду. Чтобы упростить вычисления, используем умножение строк на комплексные числа, сопряженные к элементам первого столбца:
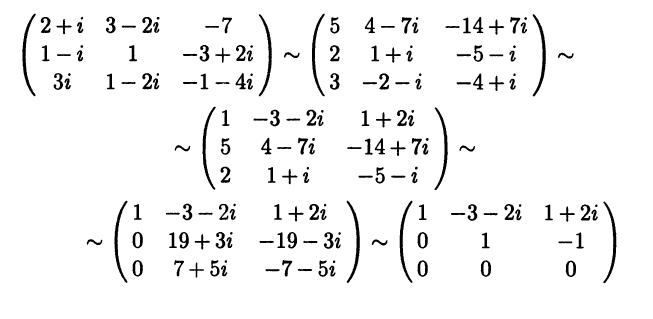
Видим, что ранг матрицы СЛАУ равен двум, а значит, линейное пространство решений одномерно. В качестве базис-ных неизвестных можно взять х1, x2, тогда х3 - свободное неизвестное. Полагая х3 = 1, находим x2 = 1, х1 = 2. Таким образом, фундаментальная система решений рассматриваемой СЛАУ имеет один вектор x(1) = (2 1 1)T , а общее решение имеет вид
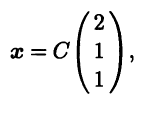
где С - произвольное комплексное число. #
Далее мы будем рассматривать линейные пространства только над полем действительных чисел.
Вопросы и задачи
- Может ли линейное пространство состоять из: а) двух элементов; б) одного элемента; в) 100 элементов?
- Выясните, образует ли линейное пространство:
- Пусть множество М состоит из одного элемента а. Определим операции сложения и умножения на действительное число α соответственно равенствами: а + а = а, αа = а. Является ли М линейным пространством?
- Предположим, что множество М состоит из всевозможных упорядоченных пар действительных чисел x = (α1,α2). Пусть на этом множестве заданы следующие операции: а) если x = (α1,α2), у = (β1,β2), то x + у = (α1 + β1, α2 + β2); б) если γ ∈ R и х ∈ М, то γx = (γα1,α2). Является ли М линейным пространством?
- Является ли линейным пространством множество всех действительных чисел, если операции сложения ⊕ и умножения
 на число ввести следующим образом: x ⊕ у = x + у, a x = |а|x?
на число ввести следующим образом: x ⊕ у = x + у, a x = |а|x? - Докажите, что множество матриц-столбцов высоты n образует линейное пространство относительно матричных операций сложения и умножения.
- В линейном пространстве V3 заданы три вектора
- Пусть в линейным пространстве L задана линейно независимая система из п векторов. При каких условиях можно утверждать, что dimL = n?
- Докажите, что dimV2 = 2, dimV3 = 3
- Найдите размерность линейного пространства, состоящего из решений системы линейных однородных уравнений [III]. Как связаны между собой понятия: а) базис и фундаментальная система решений; б) размерность линейного пространства решений и ранг матрицы системы?
- Векторы a1, a2, а3, a4 линейного пространства L заданы своими координатами в некотором базисе:
- Выясните, образуют ли векторы
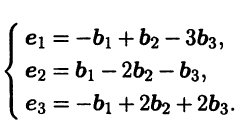
- Найдите координаты вектора х в базисе е = (e1 е2 е3), если известны его координаты (-1 4 3)T в базисе b = (b1 b2 b3), а базисы связаны соотношениями
- В линейном пространстве две системы векторов b = (b1 b2 b3) и е = (e1 е2 е3) заданы своими координатами в некотором базисе:
- Найдите размерность dimMnm(R) линейного пространства матриц типа m×n с элементами из R.
- Является ли матрица
- Какой вид имеет матрица перехода от старого базиса к новому, если матрица перехода от нового базиса к старому является: а) треугольной; б) симметрической; в) кососимметрической?
- Может ли в пространстве V3 матрица перехода быть кососимметрической?
- При каких условиях векторы а, b, a×b в пространстве V3 образуют базис?
- Докажите, что в линейном пространстве Кn[х] многочлены (x - a)k, k = 0,n, а = const, образуют базис. Найти координаты произвольно взятого многочлена р(х) ∈ Кn[х] в этом базисе.
а) множество всех векторов данной плоскости, не парал-лельных данной прямой, относительно линейных операций над векторами;
б) множество всех векторов плоскости с началом в начале системы координат, расположенных в правой полуплоскости, относительно обычных операций сложения и умножения векторов;
в) множество кососимметрических матриц третьего порядка относительно операции сложения матриц и умножения матрицы на число;
г) множество функций вида acost + bsint, t ∈ (- ∞,∞), a,b ∈ R, относительно обычных операций сложения функций и умножения функции на число;
д) множество многочленов степени п относительно обычных операций сложения многочленов и умножения многочлена на число.
a1 = {l;4;3}, a2 = {3;3;2}, a3 = {8;1;3}.
Выясните, является ли система этих векторов линейно зависи-мой. Если система линейно зависима, то найдите зависимость между векторами (нулевую нетривиальную линейную комбинацию этих векторов).

Является ли система этих векторов линейно зависимой? Дайте ответ, не проводя вычислений.
a1 = (1, 0, 0, 0), a2 = (1, 1, 0, 0),
a3 = (1, 1, 1, 0), a4 = (1, 1, 1, 1)
базис в линейном арифметическом пространстве R4?

Докажите, что эти системы являются базисами. Найдите: а) матрицу U = Рbe перехода от базиса b к базису е; б) матрицу Рeb обратного перехода от базиса е к базису b; в) координаты вектора е2 в обоих базисах; г) координаты вектора х = -3b1 - 5b2 + 2b3 в базисе е.
матрицей перехода от одного базиса трехмерного линейного пространства к его другому базису?
Линейные операции над векторами
Базис. Cкалярное произведение
Векторное и смешанное произведения векторов
Декартова система координат. прямая на плоскости
Плоскость в пространстве
Прямая в пространстве
Кривые второго порядка — I
Кривые второго порядка — II
Поверхности второго порядка
Матрицы и операции с ними
Обратная матрица
Ранг матрицы
Системы линейных алгебраических уравнений
Свойства решений однородных и неоднородных СЛАУ